紧凑型人形机器人SEA驱动器 集成力矩/位置传感器与谐波减速器的机械设计方案
随着服务机器人、医疗康复及仿生科技的发展,对高性能、高集成度驱动单元的需求日益迫切。其中,串联弹性驱动器(Series Elastic Actuator,SEA)以其固有的柔顺性、高力矩带宽及能量效率,成为先进机器人关节驱动的关键解决方案。本文聚焦于一种专为紧凑型人形机器人设计的SEA驱动器机械方案,其核心创新在于深度集成力矩传感器、位置传感器与谐波减速器,实现了高扭矩密度、高精度控制与紧凑结构的统一。
一、 总体设计目标与架构
设计目标:
1. 高集成度与紧凑性:适应人形机器人肢体狭小空间,尤其是踝、腕、手指等关节。
2. 高扭矩输出与柔顺性:通过弹性元件与谐波减速器组合,实现大扭矩、低冲击的力/位混合控制。
3. 高精度感知:原位、同步、精确测量关节输出力矩与绝对位置。
4. 高可靠性:结构坚固,适于长期动态负载。
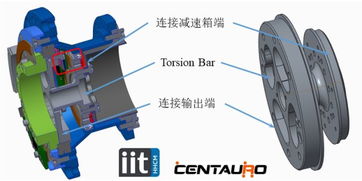
核心架构:采用经典的“电机 + 弹性元件 + 减速器”串联布局,但进行了深度集成优化。动力传递路径为:无框伺服电机 -> 高刚度扭矩传感器(作为弹性元件与力矩传感一体)-> 谐波减速器 -> 输出法兰(集成绝对位置传感器)。
二、 关键机械组件设计方案
1. 一体化力矩传感弹性体
- 结构与原理:摒弃传统独立的弹簧与力矩传感器,设计一个经有限元优化的精密金属弹性体(如十字梁、双剪切梁结构)。该弹性体在承受扭矩时产生可测量的微小形变。
- 传感集成:在弹性体形变敏感区域直接贴装高精度应变片,组成全桥电路。此设计将力矩测量与机械柔顺功能合二为一,极大减少了轴向尺寸,并提高了力矩测量的带宽和响应速度。
- 过载保护:弹性体设计包含机械限位,防止因意外冲击导致应变片或谐波减速器损坏。
2. 谐波减速器的集成与选型
- 选型考量:选择超薄、短杯规格的谐波减速器,以最小化径向与轴向尺寸。减速比根据目标关节的峰值扭矩与速度需求确定(通常在80:1至160:1之间)。
- 连接设计:
- 输入端:谐波减速器的波发生器通过一个高刚度的膜片联轴器与力矩传感弹性体的输出端连接,补偿微小同轴度误差,避免径向力影响力矩测量精度。
- 输出端:谐波减速器的刚轮固定于驱动器外壳,柔轮输出端直接与最终输出法兰连接。
- 散热与润滑:外壳设计考虑谐波减速器工作时的发热,采用导热良好的材料,并可能集成微型散热鳍片或导热带。确保润滑密封长效可靠。
3. 绝对位置传感器的集成
- 传感器选择:采用非接触式、高分辨率绝对位置传感器,如磁性编码器或电容式编码器。它们体积小、抗污染、寿命长。
- 安装位置:
- 电机侧:在电机转子后端集成一个增量式编码器,用于电机本身的换相与速度控制。
- 关节输出侧(关键):将绝对位置传感器的磁环或码盘直接安装在输出法兰的背面,读数头固定于外壳。此设计直接测量经过减速器后的最终输出轴绝对角度,完全规避了齿轮侧隙、弹性体扭转变形等中间环节误差,为机器人提供最准确的关节位置反馈。
4. 紧凑壳体与轴承布置
- 壳体:采用铝合金经精密加工而成,分为前、中、后三部分,形成模块化密封腔体。壳体同时作为所有部件的安装基准和散热体。
- 轴承系统:
- 输出法兰采用一对高精度角接触球轴承,以承受来自末端的径向与轴向负载。
- 电机轴与弹性体输入轴通过深沟球轴承支撑,确保转动平稳。
- 走线与接口:所有传感器线缆(应变片电桥、编码器)通过壳体上的防水接插件引出,内部走线槽设计避免与运动部件干涉。
三、 工作流程与性能优势
- 力矩控制:当关节受到外部力时,力通过输出法兰、谐波减速器传递至一体化弹性体,使其产生形变。应变片电桥输出与扭矩成正比的电压信号,控制器据此实时调整电机电流,实现精确的力矩或阻抗控制。
- 位置控制:输出端的绝对编码器提供关节的实时精确角度,结合电机编码器的速度反馈,实现高精度的位置伺服,同时可通过力矩反馈实现柔顺的位置调整。
- 性能优势:
- 空间效率:深度集成设计使轴向长度比传统分体式SEA缩短30%以上。
- 控制性能:力矩测量紧邻负载端,带宽高;输出端绝对位置测量,精度高。
- 安全性:弹性体提供了物理柔顺性和过载保护。
- 可靠性:谐波减速器无背隙,传动精度高;整体密封设计适应复杂环境。
四、 应用与展望
此设计方案特别适用于对重量和尺寸极其敏感的双足人形机器人、外骨骼机器人和灵巧手。它为实现动态行走、安全人机交互和精细操作提供了理想的关节驱动单元。未来优化方向包括采用更先进的复合材料弹性体、集成电子驱动板(构成机电一体化模块)以及开发基于此硬件的先进柔顺控制算法,进一步推动高性能紧凑型机器人的发展。